









RM75-Serie
Die flexible Roboterarm-Serie, die leistungsstarke 6-Achsen-Technik wahlweise als kosteneffiziente Basisversion oder als feinfühliges, kraftgeregeltes Modell bietet.
Woche(n)
Realman
ROS 2
Be the first to know
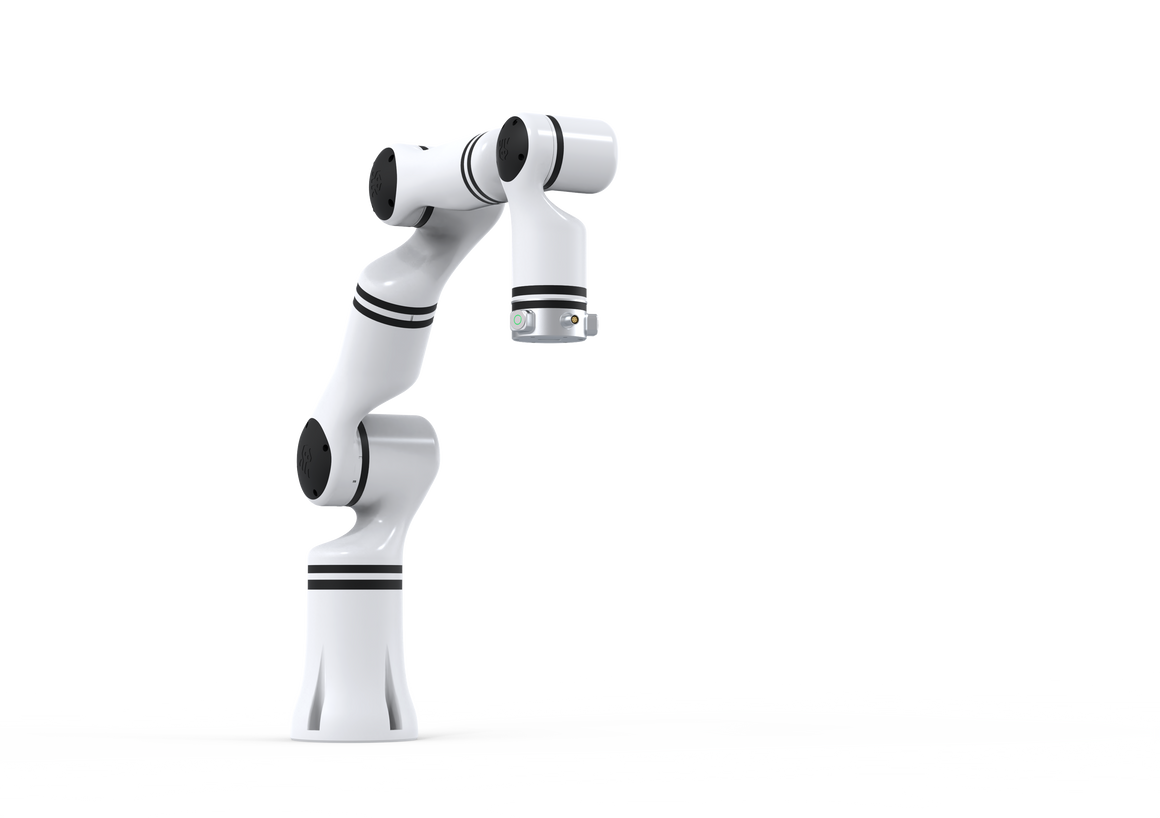
Die neue RM75-Serie: 7 Achsen für eine neue Dimension der Beweglichkeit
RealMan präsentiert die neue RM75-Serie, eine Familie von fortschrittlichen 7-Achsen-Roboterarmen, die für die nächste Generation anspruchsvoller Automatisierungsaufgaben entwickelt wurde. Mit dem siebten Freiheitsgrad bieten diese Roboter eine unübertroffene Beweglichkeit. Diese ermöglicht es ihnen, in komplexen und engen Arbeitsräumen zu agieren und Hindernisse elegant zu umfahren – eine Fähigkeit, die über die von herkömmlichen 6-Achsen-Armen hinausgeht.
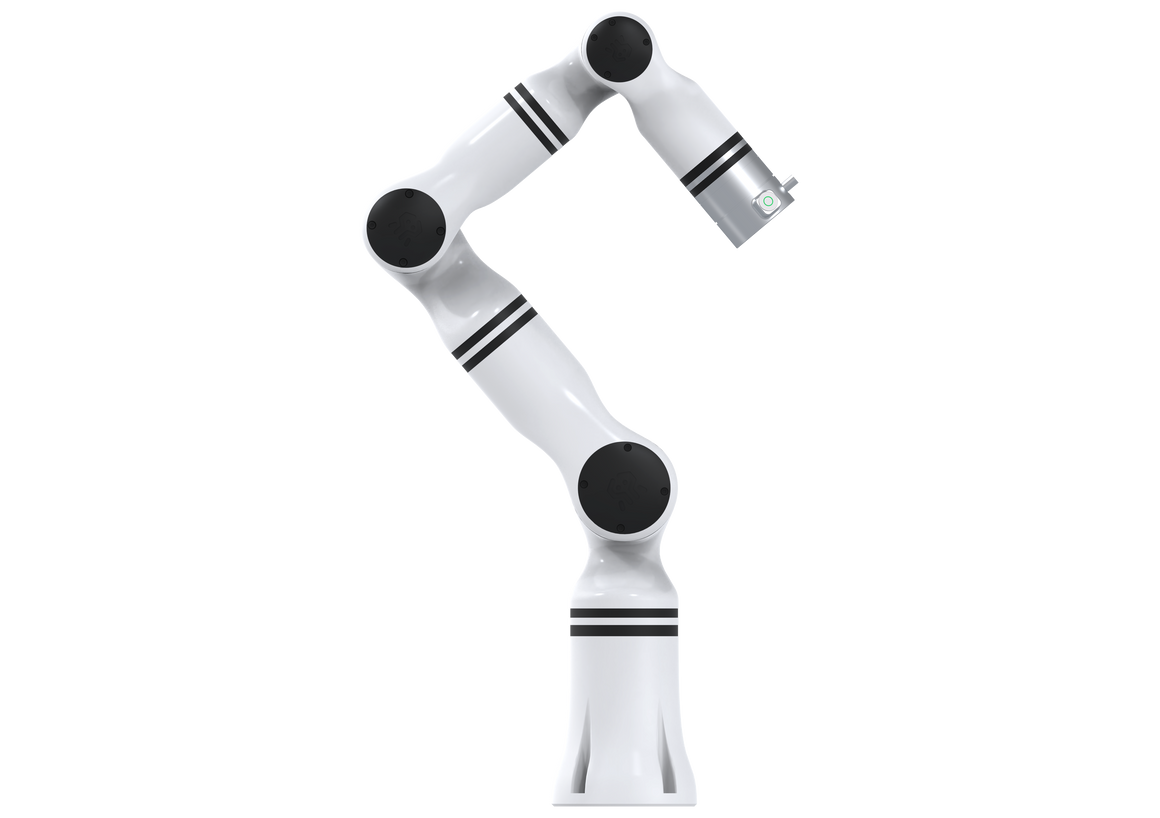
RM75-B: Der flexible Allrounder
Der RM75-B bildet die leistungsstarke Basisversion der Serie und ist der ideale Einstieg in die 7-Achsen-Robotik. Als Eigenentwicklung von RealMan verfügt er bei direkt integriertem Controller über ein Gesamtgewicht von nur 7,8 kg. Er bietet eine starke Nutzlast von 5 kg (Spitzenlast 9 kg) und einen Arbeitsradius von 610 mm. Seine außergewöhnliche Manövrierfähigkeit macht ihn zum perfekten Werkzeug für komplexe Handhabungs-, Positionierungs- und Inspektionsaufgaben.
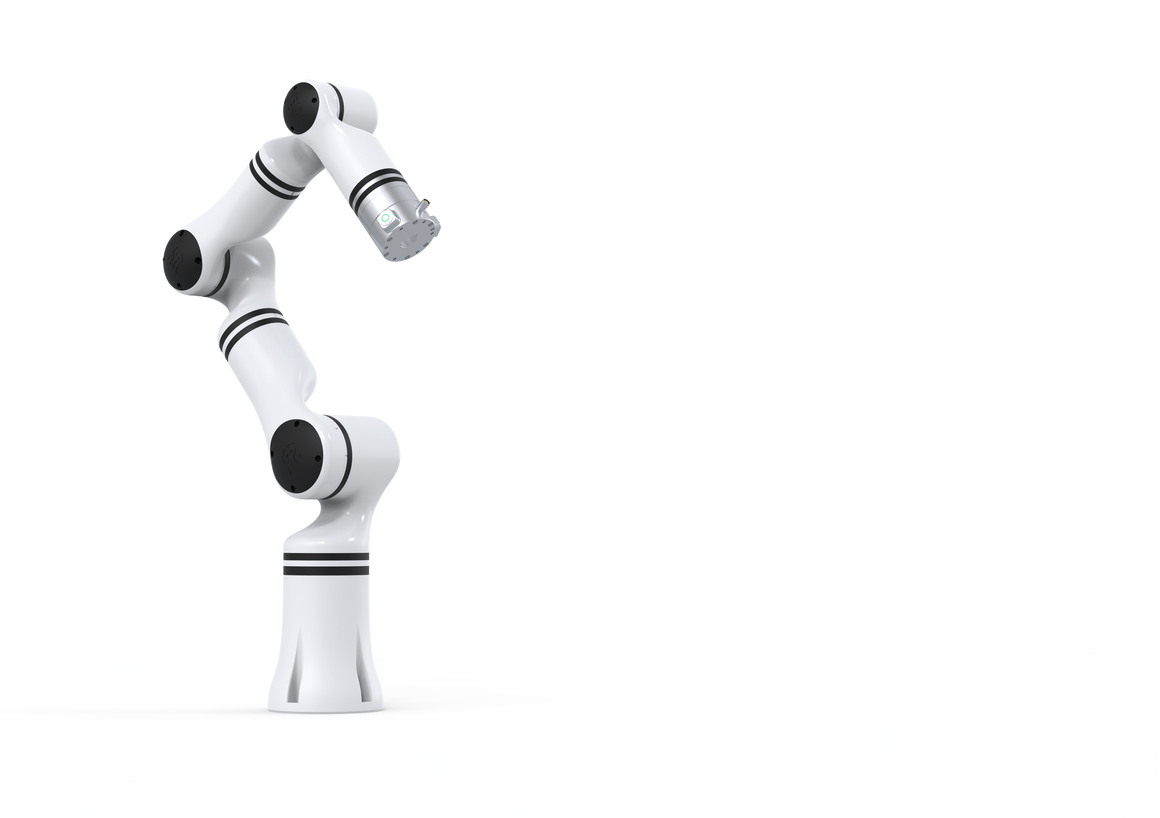
RM75-6F: Der feinfühlige Spezialist
Für Aufgaben, die höchste Präzision und Feinfühligkeit erfordern, wurde der RM75-6F entwickelt. Diese Version integriert einen hochsensiblen 6-Achsen-Kraft-Momenten-Sensor, der kraftgeregelte Anwendungen wie präzise Montage, Oberflächenbearbeitung oder sichere Mensch-Roboter-Kollaboration ermöglicht. Bei einem Gewicht von nur 7,9 kg und einer Nutzlast von 5 kg bietet er mit 638,5 mm eine erweiterte Reichweite für noch mehr Flexibilität im Arbeitsbereich.
Beide Modelle der RM75-Serie kombinieren ein leichtes, kompaktes Design mit der bewährten, integrierten Steuerung von RealMan. Ob Sie maximale Beweglichkeit oder feinfühlige Interaktion benötigen – die RM75-Serie ist die zukunftssichere Lösung für Ihre Automatisierung.
| Spezifikation | RM75-B | RM75-6F |
| Allgemein | ||
| Freiheitsgrade (DOF) | 7 | 7 |
| Nutzlast | 5 kg | 5 kg |
| Eigengewicht | 7,8 kg | 7,9 kg |
| Wiederholgenauigkeit | ±0,05 mm | - |
| Arbeitsradius | 610 mm | 638,5 mm |
| Kraftsensor | ||
| 6-Achsen-Kraftbereich | - | 200 N / 7 Nm |
| 6-Achsen-Kraftgenauigkeit | - | < 0,1 % FS |
| System | ||
| Spannungsversorgung | DC 24V | DC 24V |
| Leistungsaufnahme | Max. 200 W / Typisch 100 W | Max. ≤200 W / Typisch ≤100 W |
| Schutzart | IP54 (Roboterarm) | IP54 (Roboterarm) |
| Material | Aluminiumlegierung | Aluminiumlegierung |
| Steuerung | Integriert | Integriert |
| Kommunikation | WLAN / Ethernet / Bluetooth / USB / RS485 | WLAN / Ethernet / Bluetooth / USB / RS485 |
| Steuerungsmodi | Drag-and-Drop-Teaching / Teaching-Pendant / API / JSON | Drag-and-Drop-Teaching / Teaching-Pendant / API / JSON |
| Gelenke | ||
| Gelenkbereich | J1: ±178°, J2: ±130°, J3: ±178°, J4: ±135°, J5: ±178°, J6: ±128°, J7: ±360° | J1: ±178°, J2: ±130°, J3: ±178°, J4: ±135°, J5: ±178°, J6: ±128°, J7: ±360° |
| Max. Gelenkgeschwindigkeit | J1-J2: 180°/s, J3-J7: 225°/s | J1-J2: 180°/s, J3-J7: 225°/s |